2017年2月,宇(yu)視(shi)與全球近百家(jia)知名廠(chang)商和研(yan)究機(ji)構同(tong)臺競技,在計算(suan)機(ji)視(shi)覺算(suan)法(fa)權(quan)威(wei)測評(ping)平臺KITTI 以三個單項(xiang)第一、總(zong)分(fen)第一刷新世界(jie)(jie)紀錄。歷(li)年來參加(jia)KITTI 評(ping)測的研(yan)究機(ji)構及高校包(bao)括(kuo)加(jia)州大學、NEC 北美研(yan)究院、百度深度學習研(yan)究院等世界(jie)(jie)頂(ding)級研(yan)究團體。
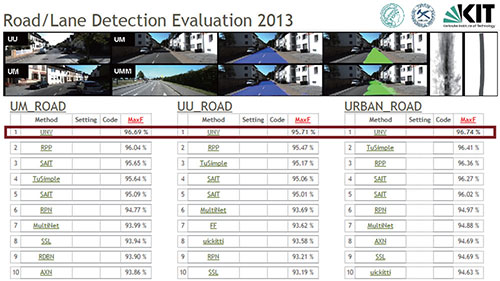
參賽者以(yi)匿名(ming)評測(ce),其中(zhong)宇視使用(yong)的unv代(dai)號是全球產(chan)品(pin)品(pin)牌(pai);車道檢測(ce)任務(wu)自2013年開始
KITTI 算法(fa)評(ping)測(ce)平(ping)臺,由德(de)國(guo)卡爾斯魯厄理工學院和芝加哥豐田(tian)技(ji)術(shu)研(yan)究所聯(lian)合創辦,是目前國(guo)際上具(ju)備(bei)(bei)影(ying)響力(li)的計算機視覺(jue)算法(fa)評(ping)測(ce)數(shu)據集之一。用于評(ping)測(ce)目標(機動(dong)車、非機動(dong)車、行人等)檢測(ce)、目標跟蹤、路面分割等視覺(jue)技(ji)術(shu)的性(xing)能(neng),為(wei)機動(dong)車輔助駕駛應用做技(ji)術(shu)評(ping)估(gu)與技(ji)術(shu)儲備(bei)(bei)。
本次車(che)道檢(jian)測(ce)任(ren)務,要(yao)求參與者使用計(ji)算(suan)機視(shi)覺(jue)算(suan)法準確(que)檢(jian)測(ce)出(chu)由相機所拍(pai)攝的(de)城市街道,包(bao)括(kuo)urban unmarked、urban marked、urban multiple marked 三個場景(jing)及前三個場景(jing)的(de)平均值urban road 四項,從(cong)準確(que)率(lv)、召回(hui)率(lv)、錯誤率(lv)、漏檢(jian)率(lv)等六個維度進行綜(zong)合評測(ce)。此技術可應用于交通(tong)流(liu)量統計(ji)、擁堵和拋灑物檢(jian)測(ce),也可拓(tuo)展至監(jian)控視(shi)頻活(huo)動(dong)目標(biao)提取、人群密度監(jian)測(ce)等。
KITTI 評測(ce)(ce)包含市(shi)區、鄉村和(he)高速公路(lu)等場景采集的(de)真實圖像數據,每張(zhang)圖像中多達(da)15輛(liang)車(che)(che)(che)和(he)30個行人,還有各種(zhong)程度的(de)遮擋(dang)。由于(yu)車(che)(che)(che)道(dao)(dao)場景豐富、光照差異(yi)性大,道(dao)(dao)路(lu)兩側停車(che)(che)(che)車(che)(che)(che)輛(liang)、中央行駛車(che)(che)(che)輛(liang)和(he)步行行人形成各類干擾,部分場景為轉(zhuan)彎或十字交叉路(lu)口,檢測(ce)(ce)難(nan)度非(fei)常大。
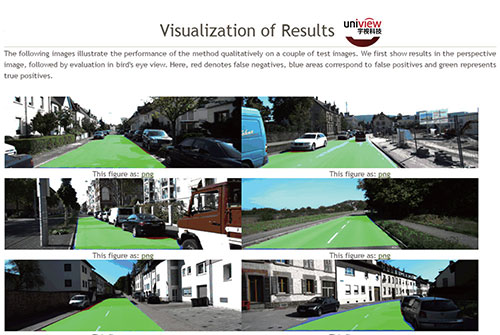
宇視評測(ce)結果,視覺(jue)算(suan)法(fa)準確檢(jian)測(ce)出的由(you)相機所拍攝的城市街道
宇(yu)視(shi)研發(fa)總裁王(wang)玉波表示(shi):“權威的公開評測(ce)是(shi)衡量算法團(tuan)(tuan)隊(dui)水平的重(zhong)要平臺(tai)。KITTI 道路(lu)檢測(ce)樣本較(jiao)少(shao),對于深度(du)學(xue)習任(ren)務(wu)來說極具(ju)挑戰(zhan)。宇(yu)視(shi)研發(fa)團(tuan)(tuan)隊(dui)基于深度(du)學(xue)習算法的積累,構(gou)建優(you)(you)秀的多任(ren)務(wu)聯合模型(xing),從樣本分解(jie)、模型(xing)調整到參數調優(you)(you),不斷優(you)(you)化,最終在KITTI 評測(ce)中(zhong)刷新了世(shi)界紀錄。宇(yu)視(shi)的目標是(shi)向世(shi)界頂級(ji)的研究機構(gou)看齊(qi),為驅(qu)動行業(ye)技術進步創造價值(zhi)。”


